A Deep Dive into MIL, SIL, and HIL Methodologies
3 min read
Introduction
In the world of Advanced Driver Assistance Systems (ADAS), ensuring that software functions correctly and safely is a huge challenge. To address this, engineers use different types of simulations— Model-in-the-Loop (MIL), Software-in-the-Loop (SIL), and Hardware-in-the-Loop (HIL). Each of these methods offers unique benefits, and today I’ll explain these concepts along with a practical example: our very own SIL-GUI simulator.
Breaking Down the Simulation Spectrum
Model-in-the-Loop (MIL)
MIL testing involves simulating high-level models and algorithms in environments like MATLAB/Simulink or Python. It’s a fast way to verify mathematical models or control strategies before turning them into production code. However, since the code isn’t compiled for the final system, MIL can miss real-world issues like memory management or concurrency.
Software-in-the-Loop (SIL)
SIL testing takes a significant step forward by running your actual compiled software—think real C++ modules with all the libraries and dependencies—within a virtual environment. This method strikes a balance between rapid testing and realistic execution, enabling you to debug real code against simulated sensor data. It’s ideal for catching integration issues and validating that your ADAS algorithms behave as expected.
Hardware-in-the-Loop (HIL)
HIL testing brings physical hardware into the simulation loop. This means using actual ECUs or sensor units to interact with the simulation. While this offers the highest degree of realism—helping to uncover hardware-specific issues—it comes with higher costs, longer setup times, and reduced flexibility compared to SIL.
The SIL Advantage: A Practical Example
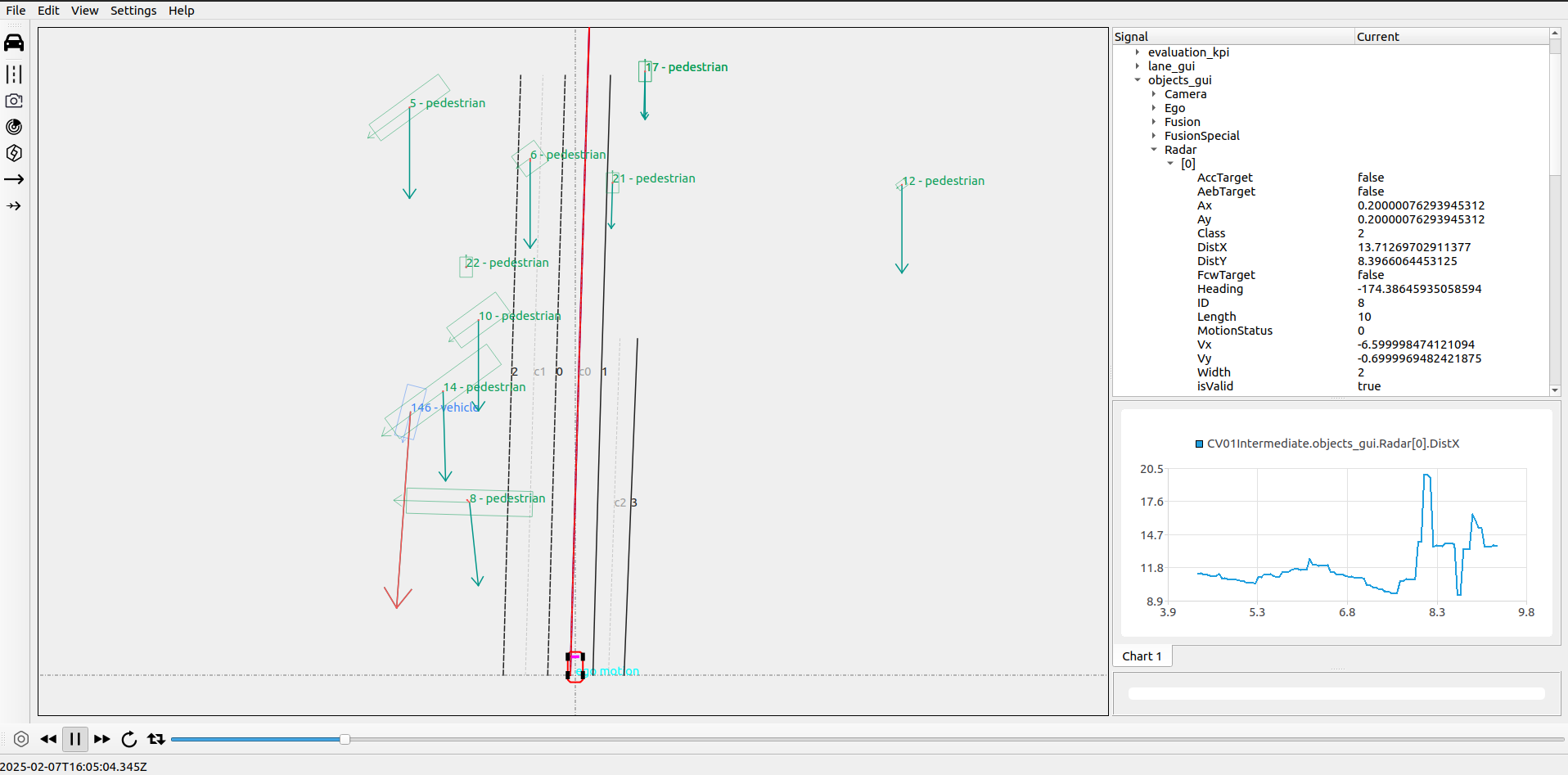
Our SIL-GUI simulator embodies the strengths of SIL testing. Here’s how it works at a high level:
- Data Replay: The simulator plays back historical or synthetic sensor data—such as camera feeds, radar readings, and vehicle dynamics logs. It supports multiple file formats, including MF4, CSV, JSON, and even ROS bag files, making it easy to integrate diverse data sources.
- Real Code Execution: Your production-level ADAS code (for tasks like sensor fusion or lane-keeping) runs within this environment, allowing you to see real responses to the input data.
- Visualization & Debugging: The tool provides a rich graphical interface that displays the ego vehicle, lane markings, obstacles, and other critical elements in real time. It also integrates with IDEs (like VSCode or QtCreator) so you can pause, step through your code, and inspect variables as you watch the simulation unfold.
For example, imagine testing a lane-keeping algorithm. By loading a log of highway driving data into the SIL-GUI, you can observe:
- How your ADAS code calculates and adjusts the steering angle in real time.
- Whether a sudden cut-in by another vehicle triggers the correct collision warning.
- How internal debug signals (like state machine transitions) change throughout the simulation.
This real-time, high-fidelity feedback loop is invaluable for iteratively tuning your software before moving on to more expensive HIL or on-road tests.
Wrapping Up
In summary, MIL, SIL, and HIL each play a vital role in ADAS development:
- MIL is perfect for initial model validation and rapid prototyping.
- SIL runs your real code in a virtual environment—balancing speed, flexibility, and realism.
- HIL provides the ultimate test of integration with physical hardware, though at a higher cost.
Our SIL-GUI simulator is a prime example of how SIL testing can streamline development, enabling thorough validation of complex ADAS functionalities in a controlled, reproducible environment. By integrating data replay (with support for various file formats), real-time visualization, and deep debugging tools, it offers a comprehensive solution that accelerates the development cycle and boosts confidence in the final product.